
Pytorch进阶之那些基础但重要的知识点
Published:
如果只沉迷于无意义的炼丹,我们的编程水平会不可否认的越来越差的。
作为每一个torch模型的base class,
LayerNorm & BatchNorm & GroupNorm
这些都是深度学习中常用的归一化方式,他们都是将输入归一化到均值为0和方差为1的分布中,来防止梯度消失和爆炸,并提高模型的泛化能力,那么它们的区别是什么呢,我们在使用时候又该如何去区分呢
BatchNorm
常见的情况是这样的:在CNN中,卷积层后面会跟一个BatchNorm层,(因为归一化之后的数据大多都为0.几了,如果不进行归一化,1.几这样连续地乘上几次就爆炸了,同样如果是0.0000 连续地乘上几次梯度就消失不见了)防止梯度的消失和爆炸,从而提高模型的稳定性。以下面的图示为例:
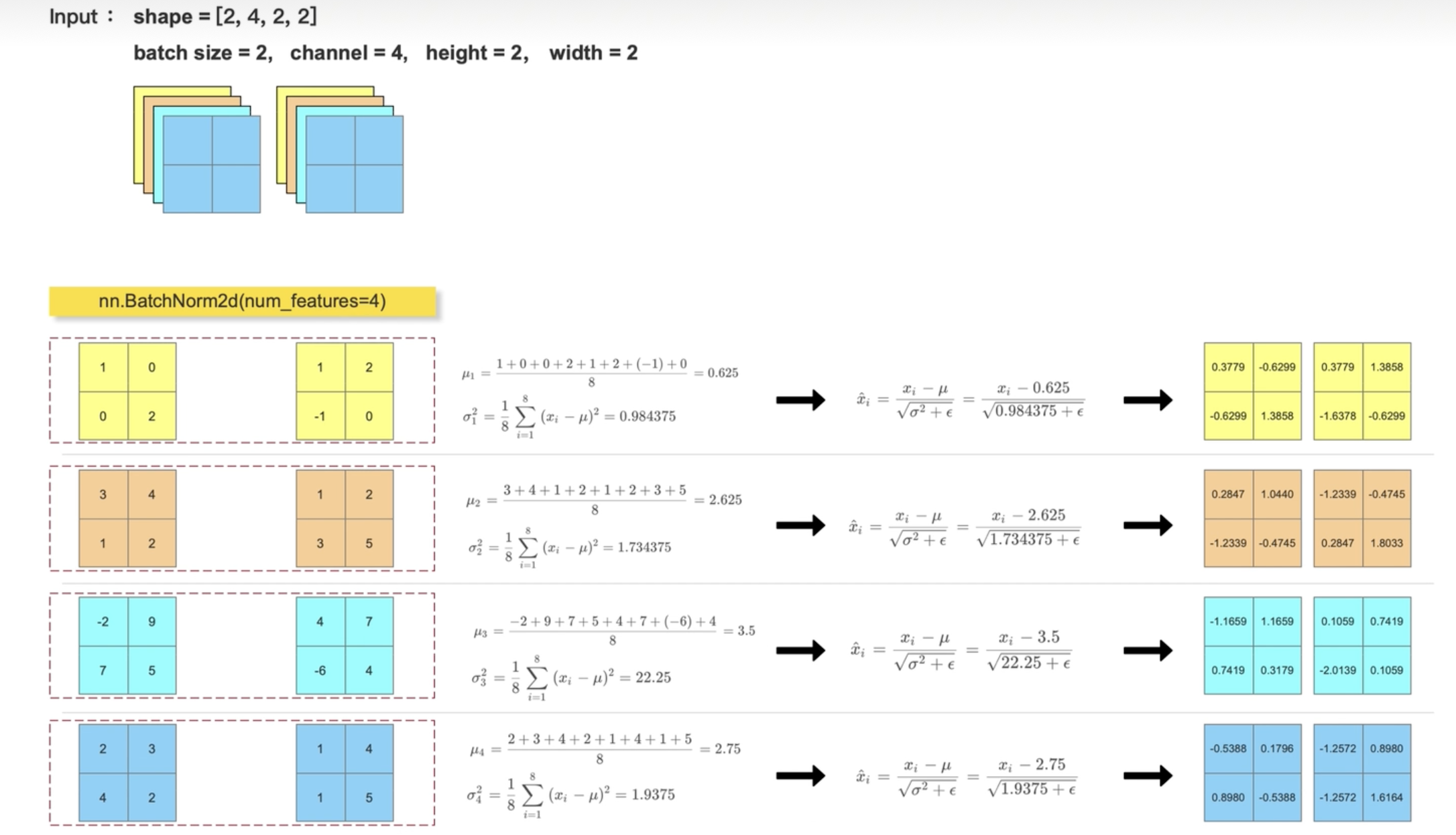
在上图的示例中,我们使用的是nn.BatchNorm2d(num_features=4)。这里输入的参数是4表示的是输入的通道数量是4.这里比较反直觉的是,对于(2,4,2,2)形状的Tensor,其做归一化的维度是channels维度,如果这个过程从0开始手写是这样的:
for i in range(feature_array.shape[0]):
channel = feature_array[:,i,:,:]
mean = channel.mean()
var = channel.var()
feature_array[:,i,:,:] = (channel - mean)/np.sqrt(var + 1e-5)
如果使用torch的框架是这样的:
import torch.nn as nn
bn_out = nn.BatchNorm2d(num_features = 4,eps=1e-5)(feature_tensor)
LayerNorm
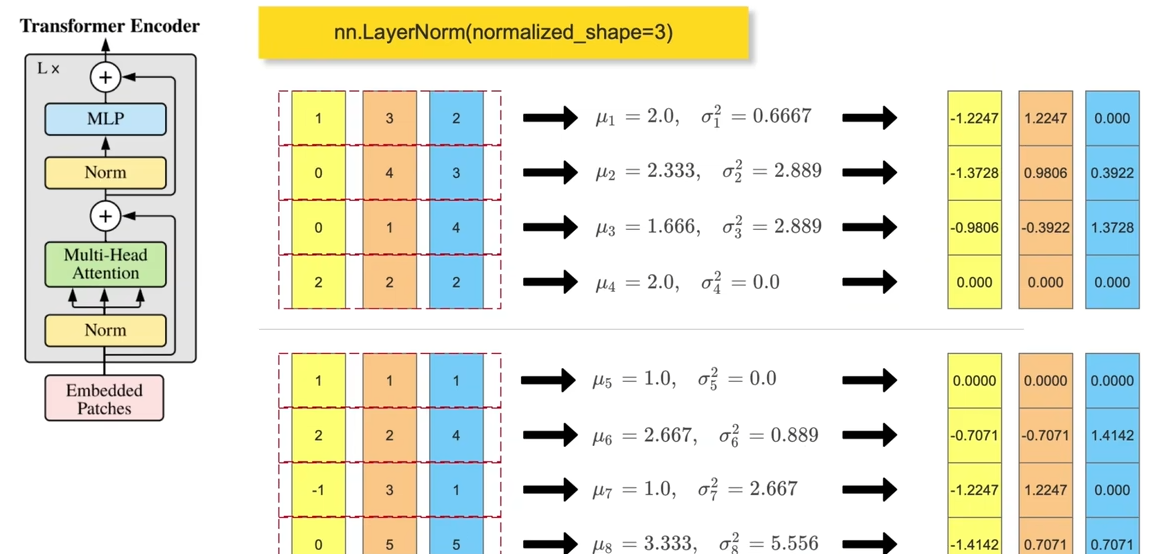
layerNorm操作更常见是在Transformer的结构中,一般输入的尺寸为(batch_size,token_num,dim),然后会在最后一个维度(每个tokeb的维度)去做归一化,一般是使用nn.LayerNorm(dim)来进行层归一化的操作。
GroupNorm
一般,当batchsize过大或者过小时候都不适合BatchNorm,Batchsize过大时候,BN会将所有的数据归一化到相同的均值和方差,而batchsize过小时候,BN可能无法有效学习数据的统计信息。(GroupNorm在当前的大模型用的比较火
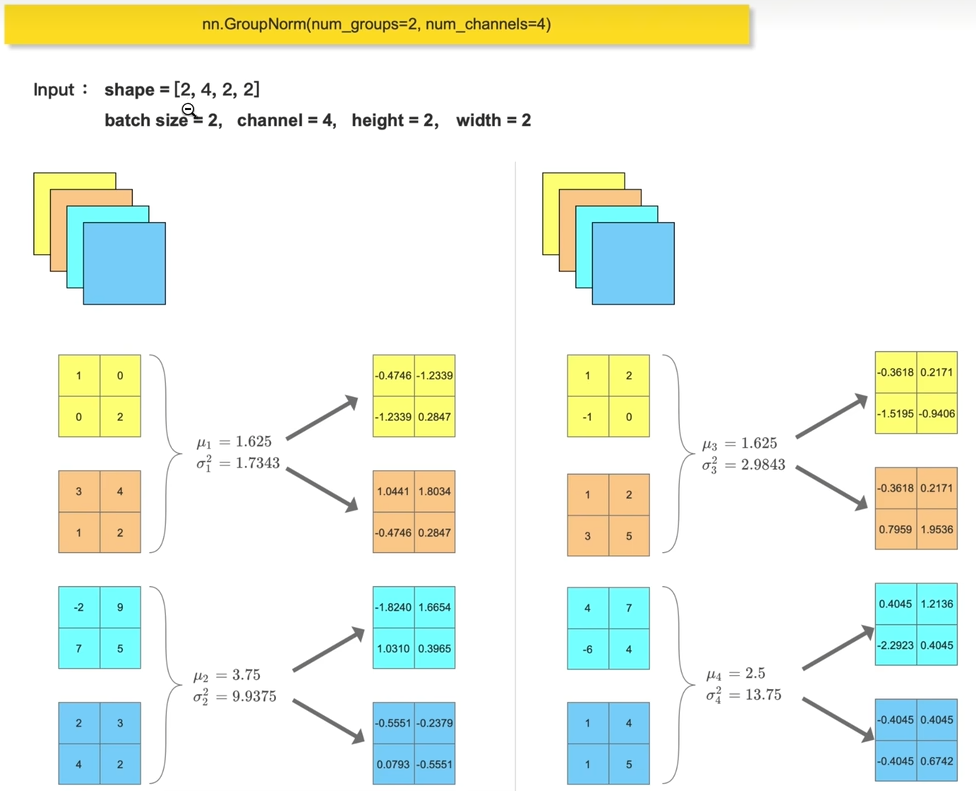
上图是在nn.GroupNorm(num_groups=2,num_channels=4)的情况下进行的,也即图像有四个通道,然后我们将四个通道分成两个组。
计算图の概念
针对于叶子节点:
- 一个错误例子示范
a = Variable(torch.rand(1, 4), requires_grad=True)
b = a**2
c = b*2
d = c.mean()
e = c.sum()
d.backward()
# RuntimeError: Trying to backward through the graph a second time
e.backward()
在执行e.backward()时候会报错,提示在试图通过这个计算图传播两次
我们将上述代码中的操作以计算图的形式进行可视化:
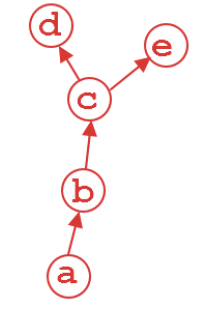
在该图中,叶子节点为a
- 我们只需要将代码改成这样即可:
a = Variable(torch.rand(1, 4), requires_grad=True)
b = a**2
c = b*2
d = c.mean()
e = c.sum()
d.backward(retain_graph=True) # 保留计算图
e.backward() # 再次对e进行梯度计算,梯度会累加上去
此时,来梳理下其具体的计算过程:
\[\begin{split} &b_i=a_i^2\\ &c_i=2b_i=2a_i^2\\ &d=\frac{\sum_ic_i}4=\frac{\sum_i 2a_i^2}4\\ &e=\sum_i c_i=\sum_i 2a_i^2 \end{split}\] \[\begin{split} &\frac{\partial d}{\partial a_i}=a_i\\ &\frac{\partial e}{\partial a_i}=4a_i \end{split}\]我们可以看出,d和e都是关于a的函数,经过backward操作,a的梯度是会累加起来的,例如下面的这段代码:
a # 此时a的值为tensor([[0.3904, 0.6009, 0.2566, 0.7936]], requires_grad=True)
a.grad # 代表的是变量 a 相对于某个标量输出(在这里是 d 和 e)的梯度 ,在执行完`e.backward()`操作之后,输出的是e的梯度
# tensor([[1.9522, 3.0045, 1.2829, 3.9682]])
5*a
# tensor([[1.9522, 3.0045, 1.2829, 3.9682]], grad_fn=<MulBackward0>)
针对于非叶子节点:
如果访问梯度的节点为非叶子节点:
a = Variable(torch.rand(1, 4), requires_grad=True)
b = a**2
c = b*2
d = c.mean()
d.backward()
b.grad
这样会爆出下面的错误:
/tmp/ipykernel_10679/3238518479.py:1: UserWarning: The .grad attribute of a Tensor that is not a leaf Tensor is being accessed. Its .grad attribute won't be populated during autograd.backward(). If you indeed want the .grad field to be populated for a non-leaf Tensor, use .retain_grad() on the non-leaf Tensor. If you access the non-leaf Tensor by mistake, make sure you access the leaf Tensor instead. See github.com/pytorch/pytorch/pull/30531 for more informations. (Triggered internally at aten/src/ATen/core/TensorBody.h:489.)
b.grad
此时,可以试图去访问下b,我们得到b为tensor([[0.8851, 0.0177, 0.8735, 0.3523]], grad_fn=<PowBackward0>) 我们查看下b的is_leaf属性,果不其然,为False
此时,我们只需要加上一行变成这样:
a = Variable(torch.rand(1, 4), requires_grad=True)
b = a**2
b.retain_grad()
c = b*2
d = c.mean()
d.backward()
b.grad
可以得到b.grad的值为tensor([[0.5000, 0.5000, 0.5000, 0.5000]])
\[\begin{split} &d = \frac{\sum_i c_i}{4}=\frac{\sum_i 2b_i}{4}=\frac{\sum_i b_i}2\\ &\frac{\partial d}{\partial b_i}=\frac12 \end{split}\]根据这里简单的推导,我们很轻松地发现这是d对于b的导数,结果为$\frac{1}{2}$
深度网络实践中的计算图
- nn中间层的weights
class MLP(nn.Module):
def __init__(self):
super(MLP, self).__init__()
self.fc1 = nn.Linear(28*28, 512)
self.fc2 = nn.Linear(512, 512)
self.fc3 = nn.Linear(512, 10)
def forward(self, x):
x = nn.Flatten(x)
x = self.fc3(nn.ReLU(self.fc2(nn.ReLU(self.fc1(x)))))
return x
mlp = MLP()
mlp.fc1.weight.is_leaf
True
mlp.fc2.weight.is_leaf
True
mlp.fc3.weight.is_leaf
True
计算图总结
- 反向传播,链式法则,内部非叶子节点(non-leaf node,哪怕 requires_grad 为 true,且其存在 grad_fn)也是会算梯度的,只是用完就置空了,
- 因此如果相查看内部非叶子节点的 grad,需要 retain_graph 保留在计算图中;
- 深度神经网络中的中间层 layer 的参数(weights & bias)它们是内部节点呢,还是叶子节点呢?
- 是叶子节点;
- 不要轻易地关闭 warnings,有助于排查/定位问题;
- warnings 不会导致程序 dump,但不推荐,因为有可能导致程序的运行不符合预期;
- 对于自己写的代码,出于健壮性或者可快速定位问题的考虑,也可以尝试多写 warnings